
Apresentando o Novo Atlas da Boston Dynamics: Aprendizado em Tempo Real e Aplicações Industriais
O icônico robô Atlas da Boston Dynamics finalmente saiu do laboratório e tivemos a oportunidade de vê-lo pessoalmente em uma grande feira de tecnologia, incluindo o modelo de produção, que é novidade. Estamos prestes a observar uma demonstração de como este robô aprende em tempo real.
Primeiras Impressões e Demonstrações
Quando o Atlas fez sua primeira aparição no evento da Hyundai na CES, ele estava caminhando de uma maneira bastante natural, diferente dos movimentos que costumávamos ver em muitos dos vídeos de demonstração anteriores. Essa caminhada mais natural era parte de um estilo que estava sendo desenvolvido.
É importante notar que aquela demonstração inicial era controlada remotamente, então é provável que seu comportamento em um ambiente de fábrica seja diferente.
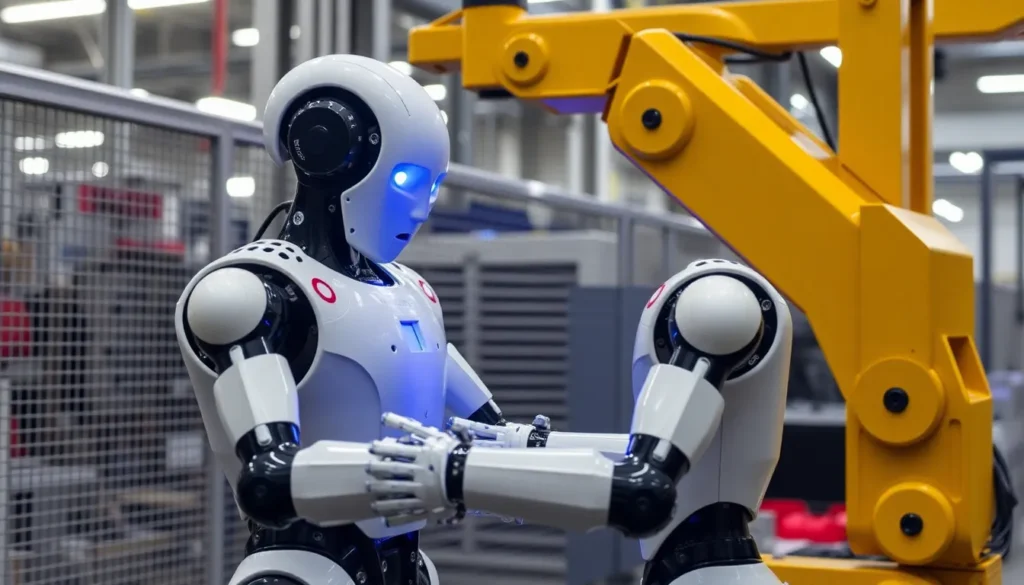
Na demonstração presencial, o Atlas foi apresentado em um cenário mais parecido com uma fábrica, realizando a tarefa de mover peças de um local para outro. Parte dessa demonstração era autônoma, e uma tela indicava quando o robô estava operando de forma independente.
Se o Atlas estivesse prestes a cometer um erro, um operador humano próximo estava pronto para intervir e mostrar ao robô a maneira correta de resolver um problema que ele estivesse enfrentando. O objetivo declarado dos responsáveis pela Boston Dynamics é demonstrar como o robô aprende em tempo real e como a intervenção humana pode informar essa autonomia.
Especificações e Cronograma de Produção
Fomos informados que o Atlas possui uma autonomia de bateria de 4 horas. Ele conta com duas baterias na parte traseira, o que permite a troca a quente (*hot-swappable*), ou seja, ele não precisa ser desligado para a substituição das baterias. Além disso, há relatos de que o Atlas é capaz de trocar suas próprias baterias, embora o material visual dessa funcionalidade ainda não tenha sido totalmente divulgado.
Quanto à disponibilidade, os planos indicam que, em 2026, esses robôs permanecerão restritos ao “ecossistema” da família, disponíveis apenas para a Hyundai Deep Mind e a própria Boston Dynamics. A expansão para indústrias relacionadas começará em 2027. A produção em escala está prevista para 2028, com a produção em massa dos modelos Atlas esperada para 2030.
Sobre as especificações físicas, o Atlas é mais alto que uma pessoa de 1,88m (6’2″) e consegue alcançar objetos a até 2,28m (7 1/2 pés) de distância. Sua capacidade de levantamento é de até 50 kg (110 lb) e ele pode operar em condições de até 40°C (104°F).
O robô é autogerador de resfriamento, o que explica as aberturas de ventilação nas laterais. Ele utiliza apenas dois tipos de atuadores: os maiores e os menores.
Segurança e Design
No contexto de robôs humanoides que irão trabalhar ao lado de humanos, a segurança é uma prioridade. A equipe examinou minuciosamente o robô, eliminando quase todos os pontos de beliscamento (*pinch points*). Isso garante que, ao manusear o robô ou caso ele caia próximo a uma pessoa, não haja risco de ferimentos por esmagamento ou beliscamento.
Embora o formato seja humanoide, existem desvios intencionais no design. As pernas do novo modelo de produção estão posicionadas um pouco mais afastadas, e algumas juntas conseguem girar 360°.
Além disso, o design do “rosto” não foi feito para ser amigável, e isso foi intencional. A justificativa é que, por não ser um ser humano, projetar uma aparência que sugira que ele seja algo que não é, pode criar uma primeira impressão equivocada, especialmente nos próximos anos, enquanto os robôs ainda não terão a mesma capacidade e inteligência que os humanos.
Parada de Emergência
Uma questão comum levantada sobre esses robôs é a localização do botão de parada de emergência. Foi esclarecido que ele não está localizado no próprio robô. Ele fica no centro de controle, junto aos computadores. Além disso, há considerações sobre qual seria a maneira mais segura de interromper o funcionamento do Atlas. Desligar completamente a energia faria com que ele caísse, e, sendo uma máquina industrial pesada, isso poderia causar danos. Por isso, o Atlas realiza um “sentar” controlado, retornando a uma posição neutra e segura.
Em última análise, o desenvolvimento de robôs como o Atlas visa competir por tarefas com os humanos, aumentando a produtividade e permitindo que as pessoas se concentrem em trabalhos maiores e melhores.
Perguntas Frequentes
- O que é a principal diferença entre o Atlas de demonstrações antigas e o modelo de produção?
O modelo de produção demonstrou uma caminhada mais natural em ambientes de fábrica e faz parte de uma estratégia de aprendizado em tempo real, diferente dos testes remotos anteriores. - Qual a duração da bateria do Atlas e como ela é gerenciada?
A bateria tem duração de 4 horas e o robô possui duas baterias *hot-swappable* na parte traseira, o que permite a troca sem desligar a unidade. - Como a segurança é priorizada no design do Atlas?
O design foi rigorosamente revisado para eliminar a maioria dos pontos de beliscamento, minimizando o risco de ferimentos para humanos próximos ou durante o manuseio do robô. - Por que o Atlas não tem um botão de parada de emergência no corpo?
A parada imediata de energia pode causar a queda do robô. A parada é controlada, movendo-o para uma posição neutra segura, e o controle de emergência reside no centro de controle central. - Qual a previsão para a produção em massa do Atlas?
A produção em escala está planejada para começar em 2028, visando a produção em massa até 2030.





